

We can think of many instances where rapidly unfolding events can quickly overtake us and cloud our judgement. Natural disasters, terrorist attacks or major accidents present a team who are tasked to respond to such situations with a common enemy – namely that of uncertainty.
In the aftermath of an incident (such as a major industrial accident) it is often the role of the first responders arriving at the scene to build-up a picture of what has happened and from this determine how best to resolve the situation and bring aid to those that most need it. The more robust and effective a team is at collecting and analysing such information will likely have an impact in terms of the effectiveness of the resolution.
There are many examples where we can see the use of new technology in assisting the teams in building this tactical situation awareness. For example, the use of unmanned aerial vehicles to detect and monitor radiation levels around the Fukushima Daiichi site and unmanned ground vehicles being deployed at Ground Zero in New York immediately after the September 11 attacks to aid search and recovery of victims buried in the rubble.
While the use of unmanned technology provides a degree of endurance and enhanced effectiveness, the introduction of autonomy to such platforms provides the human with a wider capability and flexibility in their response. The provision of intelligent software agents into that network not only aids the operator in terms of supporting critical decision making but also allow them to delegate some of the more mundane tasks to ‘free up’ their cognitive resources to focus on the overall global objective/s.
The Human-Agent Mission Planning for Emergency Responders (HAMPER) project examines the use of autonomous agents in dealing with complex emergency situations; requiring interaction between human and agents in order to achieve a goal (see Figure 1).

Figure 1 – Human-Machine Interface being developed
Using HAMPER the operator is able to generate a mission goal that is then given to the system which in turn decides how best to achieve this goal via the use of both unmanned and manned elements. In some cases a goal may be shared between both the human and agent team members, with the agent system orchestrating and responding to updates as the mission progresses. This approach allows the operator of the HAMPER system the ability to maintain tactical situation awareness and oversee progress (as the system dynamically allocates tasks based on inputs from both human and agent members of the response team; see Figure 2).
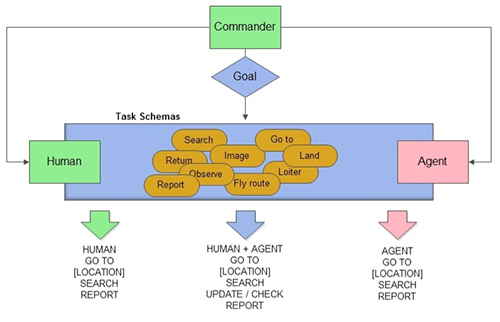
Figure 2 – Human-Agent flexible allocation of tasks
This approach demonstrates the use of autonomous systems in assisting the human operator (or Incident Officer) with not only temporal information but a beneficial decision aid.
HAMPER is a collaborative research project between Coventry University and Serious Games International. It is funded through the Growing Autonomous Mission Management Applications (GAMMA) programme led by the North West Aerospace Alliance (NWAA).
For more details contact the HAMPER team:
Dale Richards (dale.richards@coventry.ac.uk), Alex Stedmon (alex.stedmon@coventry.ac.uk), Siraj Shaikh (s.shaikh@coventry.ac.uk) and Dan Davies (dan@seriousgamesinternational.com).


Comments are disabled